Math 501: Differential Geometry
Homework 5
Lawrence Tyler Rush
<me@tylerlogic.com>
March 3, 2013
http://coursework.tylerlogic.com/courses/math501/homework05
1
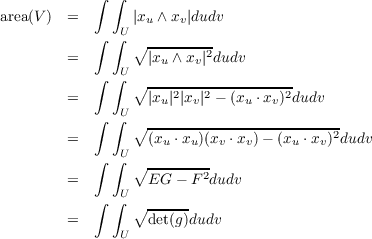
Using the formula

we have the following sequence of equations for paramtrization x : U → S for some regular surface S with V = x(U)
where g = 
2
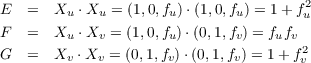
Let S be the graph of a smooth function f : ℝ2 → ℝ with coordinate mapping
X(u,v) = (u,v,f(u,v)). From this we get that Xu = (1,0,fu) and Xv = (0,1,fv).
(a) Coefficients of The First Fundamental Form
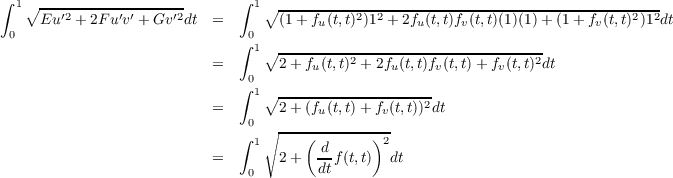
(b) Length of α
Let α(t) be the curve in S with coordinate expression of (t,t) for
0 ≤ t ≤ 1, i.e. α(t) = (u(t),v(t)) where u(t) = t and v(t) = t. With this, the length of α is given by the following.
(c) Area of V
Let V = X(U) for some bounded open set U of ℝ2. Using the equation we
derived in the first problem, we compute the area of V as follows.
3
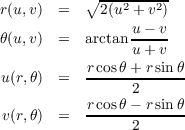
Define the following parametrizations of the xy-plane in ℝ3 We can then define the change of coordinate function, h : ℝ2 → ℝ2 by

with inverse

resulting in the change-of-coordinate functions at the coordinate level of
Computing Xu = (1,1,0) and Xv = (1,-1,0) we can then compute Y r and Y θ in terms of Xu and Xv as
follows


4
The parametrization of the rotation of the regular plane curve, (f(v),g(v), of the
xz-plane with x and z coordinates given by f(v) and g(v), respectively, is

(a)
With the above definition of the parametrization, we have the following
differential of X.
Since the curve of rotation is a regular curve then g′(v)≠0 for all v which tells us that the columns of dX(u,v) are linearly
independent and therefore dX(u,v) is injective.
(b)
With the above definition of the parametrization we get

and

from which we get
5 do Carmo Page 109 problem 2
Let φ : S1 → S2 be a local diffeomorphism with S2 orientable.
Then there is some N2 : S2 → ℝ3 that is a differentiable field of normal unit vectors. Hence N1 = N2 ∘ φ
is differentiable in a neighborhood of any q ∈ S1, but since φ(q) ∈ S2, then N2(φ(q)), which is equal to
N1(q), is a unit normal vector. Thus N2 : S1 → ℝ3 is a differentiable field of unit normal vectors, i.e. S1 is
orientable.